
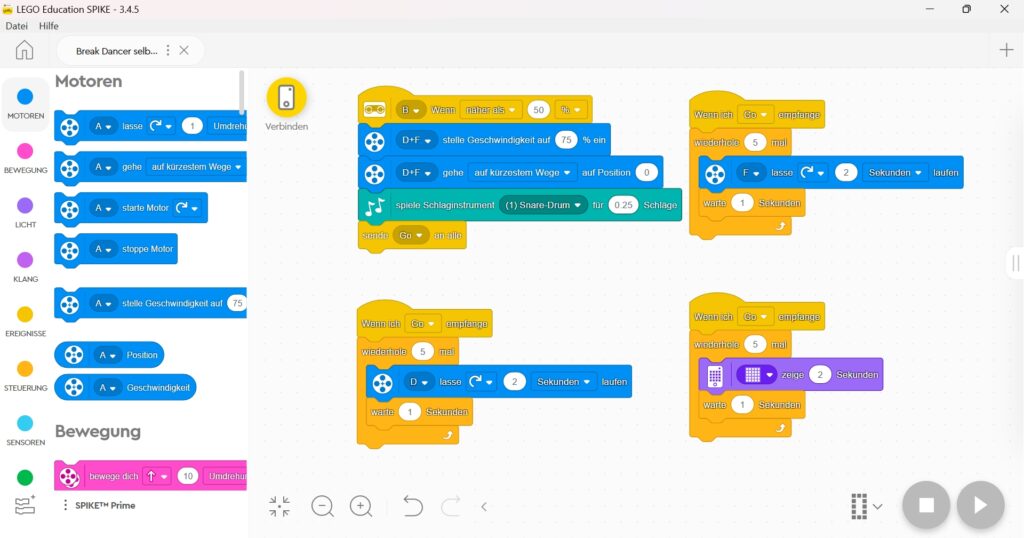
In meinem zweiwöchigen Schülerpraktikum habe ich viele unterschiedliche Dinge kennengelernt wie zum Beispiel die Beklebung und Beschriftung neuer PC-Monitore zur Inventarisierung. Allerdings habe ich mit Abstand die meiste Zeit im Büro für Digitale Lehre verbracht wo ich an meinem Projekt mit Lego Education Spike gearbeitet habe. Das war mein Hauptprojekt worüber ich glücklich war, da es zugleich spannend war als auch Spaß gemacht hat. In Lego Education Spike Prime habe ich mir zuerst das Programm angeschaut und mir die Möglichkeiten bewusstgemacht. Dann habe ich mit meinem ersten Projekt begonnen, unzwar mit dem bauen eines kleinen Roboters. Dieser Roboter kann tanzen und sein Name ist Break-Dancer.
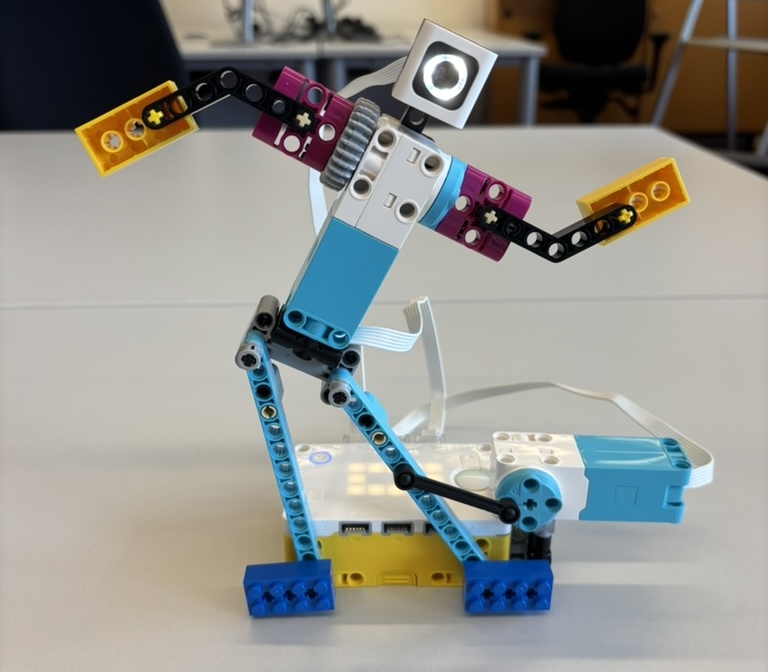
Dieses Projekt war noch ziemlich simpel da ich es noch mit den scratchartigen Textblöcken gemacht habe und es eines der einfacheren Aufbaumöglichkeiten war.
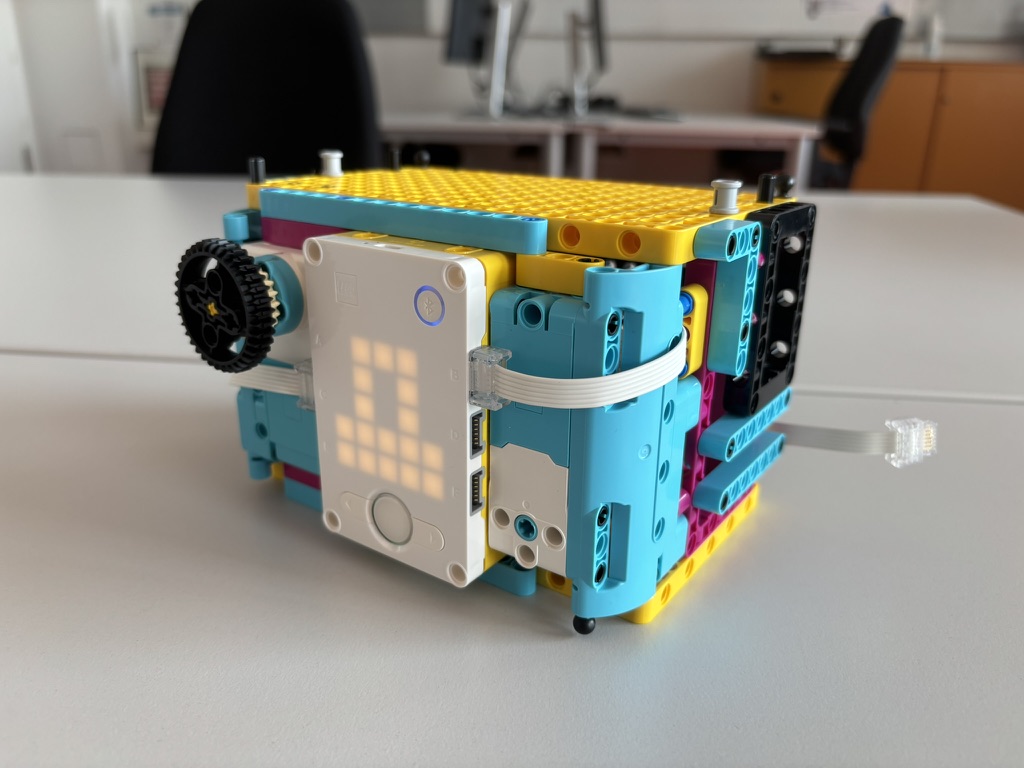
Als nächstes wollte ich eine neue, etwas schwierigere Aufbaumöglichkeit ausprobieren was ich dann auch versucht habe ich aber leider nicht beenden konnte da man für diese Aufbaumöglichkeit ein Erweiterungsset braucht. Ohne dieses Erweiterungsset treten Probleme auf wie zum Beispiel das es manche Teile nur in einer anderen Farbe gibt oder aber auch, dass es die Teile ohne das Erweiterungsset gar nicht gibt. Deswegen Haben wir uns dann für eine andere Aufbaumöglichkeit entschieden, den Safe.
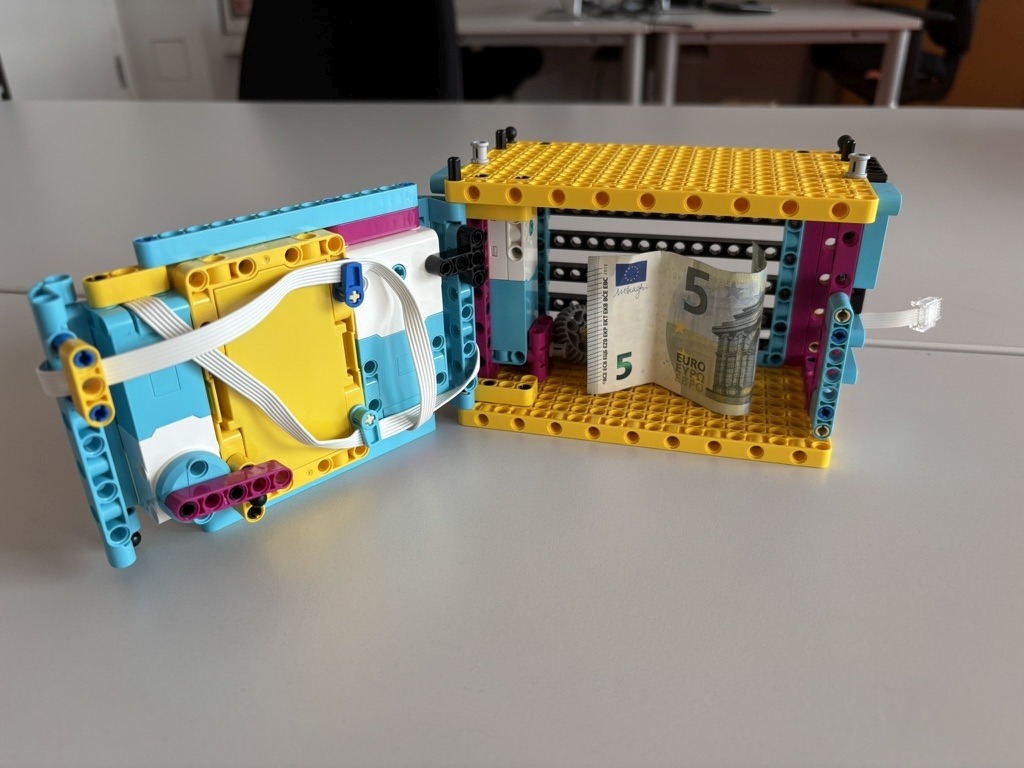
Den Safe konnte man auch ohne das Erweiterungsset aufbauen und es war von der Schwierigkeit ähnlich wie das Set das ich mir zuvor ausgesucht hatte. Beim Aufbauen des Safes gab es dann keine Probleme. Das Programmieren war dann schon etwas schwieriger als das von dem Roboter, aber trotzdem kein großes Problem da ich es immer noch mit den Textblöcken gemacht habe.
Neben anderen Bereichen in die ich hineinschnuppern konnte, habe ich wieder den Roboter aufgebaut, da wir uns gedacht hatten das der kleine Roboter super in den Schaukasten passen würde. Außerdem hatten wir die Idee, dass wir mit ihm auf spielerische Weise Python versuchen kennenzuleren.
Das Ziel war, dass immer wenn jemand an unserem Roboter vorbeiläuft er anfängt zu tanzen, und so die Blicke auch auf die Poster lenken kann. Das habe ich dann mit Python programmiert. In der Software wurde ich beispeilhaft an verschieden Schritte des Programmierens herangeführt. Mit dem Wissen habe ich versucht, den Code den ich davor schon mit den Scratchähnlichen Baublöcken programmiert hatte, in Python umzuwandeln. Als ich nicht weiter kam, konnte ich gezielt mit KI Fragen beantworten.
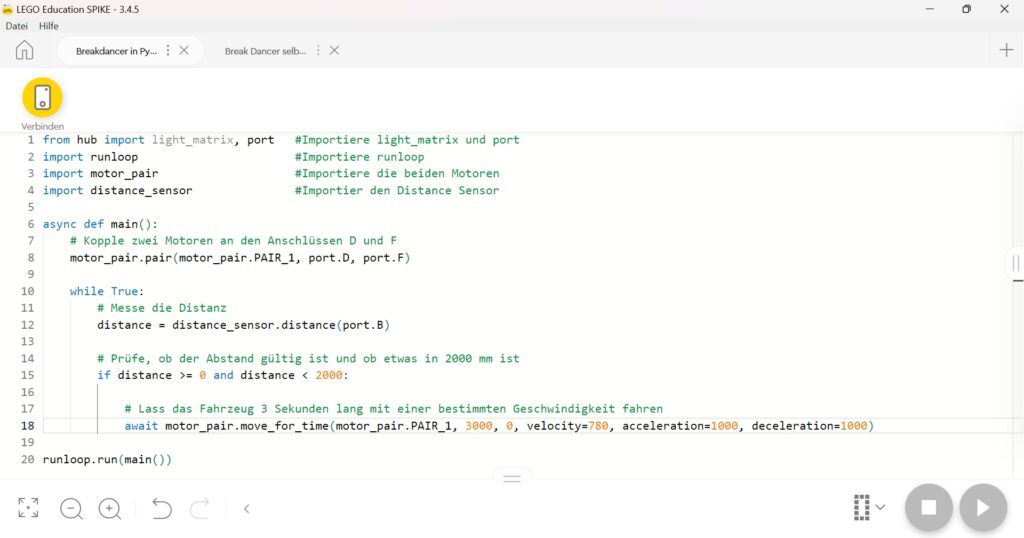
Nachdem wir das geschaft hatten haben wir den Break-Dancer in den Schaukasten gestellt, doch dabei festgestellt, dass der Abstandsensor das Glas erkannt und der Roberter dadurch immer tantzt. Zuerst habe ich versucht das Problem dadurch zu lösen, dass ich im Code definiert habe, dass er nicht tantzen soll wenn etwas in 10 oder weniger Zentimetern Abstand zu ihm ist. Das hat aber nicht geklappt, da er nicht durch das Glas durchgucken konnte.
Also haben wir das Problem gelöst, indem wir den Abstandsensor außerhalb des Glases angebracht haben. Das hat dann auch geklappt. Ich schreibe diesen Blogbeitrag gerade während ich im Foyer sitze und beobachte wie immer wieder Leute mit dem Roboter interagieren.
Die hier genutzten Lego Education Spike Sets können im DL-Büro für die Lehre ausgeliehen werden. Gerne einfach eine E-Mail an digitalelehre.ew@uni-hamburg.de senden, um das Thema zu besprechen.
Ebenfalls möchten wir gern auf unser Workshopangebot hinweisen. Rechtzeitig zum Sommersemester lässt sich hier unser Workshopangebot finden.
Schreibe einen Kommentar